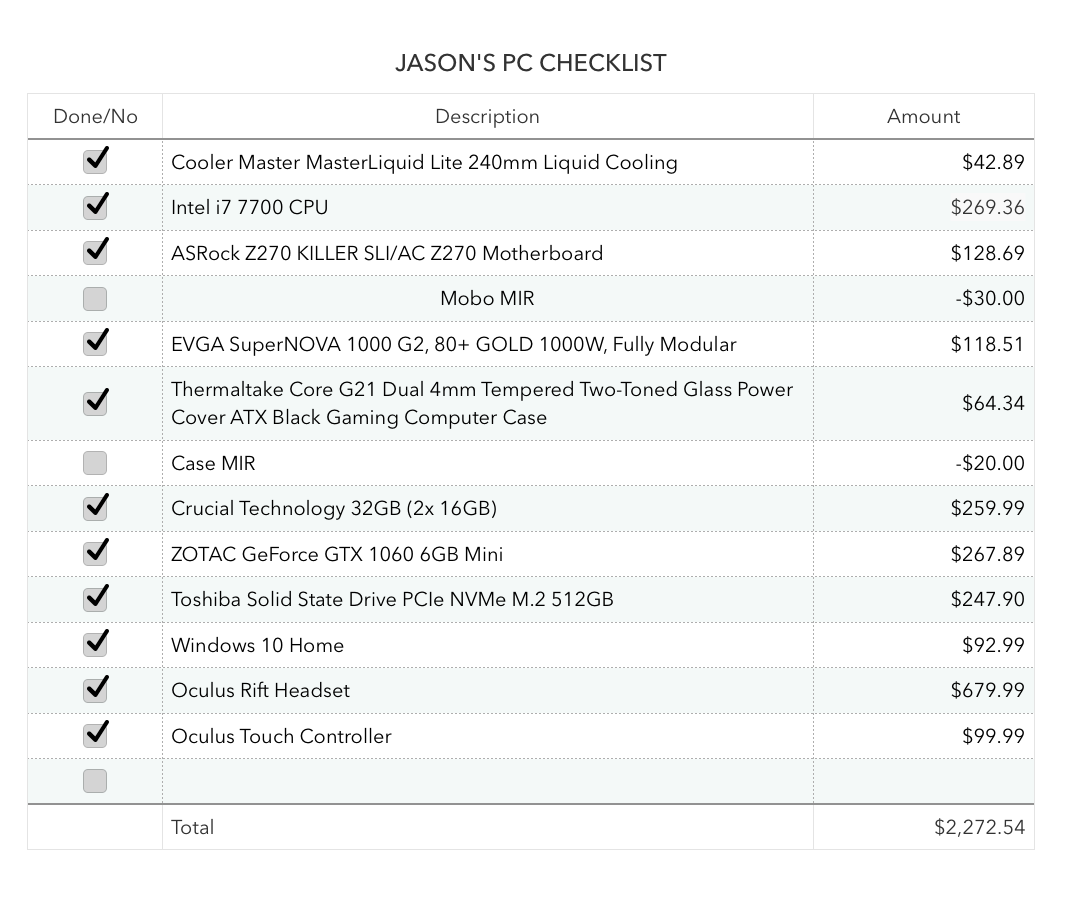
Done/No,Description,Amount
TRUE,Cooler Master MasterLiquid Lite 240mm Liquid Cooling,$42.89
TRUE,Intel i7 7700 CPU,$269.36
TRUE,ASRock Z270 KILLER SLI/AC Z270 Motherboard,$128.69
FALSE,Mobo MIR,-$30.00
TRUE,”EVGA SuperNOVA 1000 G2, 80+ GOLD 1000W, Fully Modular”,$118.51
TRUE,Thermaltake Core G21 Dual 4mm Tempered Two-Toned Glass Power Cover ATX Black Gaming Computer Case ,$64.34
FALSE,Case MIR,-$20.00
TRUE,Crucial Technology 32GB (2x 16GB),$259.99
TRUE,ZOTAC GeForce GTX 1060 6GB Mini,$267.89
TRUE,Toshiba Solid State Drive PCIe NVMe M.2 512GB,$247.90
TRUE,Windows 10 Home,$92.99
TRUE,Oculus Rift Headset,$679.99
TRUE,Oculus Touch Controller,$99.99
FALSE,,
,Total,”$2,272.54″